Definición y diseño de un equipo basado
en bus AS-i
Elección
de la arquitectura
La instalación de una arquitectura basada en bus
AS-i requiere los siguientes elementos:
· un maestro que
gestione el bus (módulo para autómata o pasarela),
·
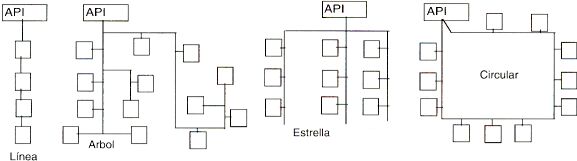
un cable que puede ser instalado como bus en línea, en forma de árbol,
estrella o en anillo,
· interfaces de bus para conectar los
sensores/accionadores (algunos con circuito integrado AS-i y otros sin él),
·
tes de conexión o de derivación,
· y una alimentación
de 24 V específica para AS-i.
La elección de la
arquitectura se realiza teniendo en cuenta 5 criterios fundamentales que
se detallan en los capítulos siguientes:
· topología
de la máquina,
· tipos de sensores/accionadores,
·
tipo de máquina,
· tiempo de respuesta necesario,
·
servicios de utilización y mantenimiento.
Topología de la máquina
En el caso de una máquina compacta (conjunto de
sensores/accionadores situados en un perímetro definido) es
aconsejable una topología del bus AS-i en estrella o en árbol
dentro de las 4 posibles.
Las diferentes ramas (segmentos del bus
AS-i) se conectan a las bornas AS-i + y AS-i - del maestro.
Máquina
compacta:
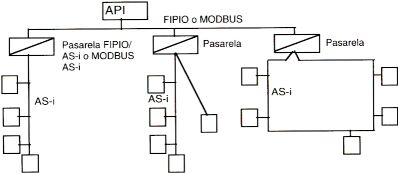
En
el caso de una máquina extensa, se utiliza el principio de la
pasarela AS-i para deslocalizar un segmento AS-i. Esta puede ser una
pasarela FIPIO/AS-i (descentralización de entradas/salidas) o una pasarela
MODBUS/AS-i.
Máquina extensa:
Tipo de sensor/accionador utilizado
El tipo de módulo de interface del bus AS-i depende
de los sensores/accionadores utilizados (ver cap. sobre principales
características y prestaciones, elementos
básicos: selección de productos de catálogo, elementos básicos:
componentes del bus, el hardware: cables y
accesorios de cableado):
· en el caso de sensores/accionadores convencionales se utilizan:
-repartidores activos (4 puntos de conexión),
-un interface de bus de tipo Telefast SB2 que permite
conectar hasta 4 entradas y 4 salidas,
· en el caso de
sensores/accionadores AS-i, se utilizan repartidores pasivos de 4 vías
o tes de conexión. Los componentes AS-i se utilizan principalmente
cuando se pretende explotar las funciones propias de este tipo de sensor o
accionador (por ejemplo, en el caso de sensores o accionado res
inteligentes, posiciones de reposo, tiempos de filtrado, etc.).
5.1.3 Tipo de máquina
La complejidad de la máquina que se va a equipar
determina la arquitectura de la instalación en función de:
· el número de sensores,
· el número de
accionadores,
· la implantación de los
sensores/accionadores,
· el tipo de accionadores (grandes
consumos de corriente o no),
· las distancias.
Influencia
del número y tipo de sensores/accionadores:
El número
de esclavos en un bus AS-i está limitado a 31.
Si los
sensores/accionadores están "Asificados" (disponen del
componente ASIC integrado), se pueden conectar 31 como máximo, cada
uno de ellos asignado a una dirección AS-i.
Si los
sensores/accionadores son convencionales, será preciso recurrir a
repartidores activos (IP67) o a interfaces bus/entradas-salidas TON
(Telefast SB2 IP20). Ambos productos, repartidores activos y Telefast, están
"Asificados", por lo que como máximo se podrán
conectar 31 elementos en cada bus AS-i. Esto ofrece varias posibilidades
en el número de señales que se podrán gestionar desde
cada bus AS-i:
· 31 repartidores activos IP20:
-
de 2E/2S: 62 señales de entrada y 62 señales de salida (124
E/S)
- de 4E: 124 señales de entrada
- de 4S: 124 señales de salida
· 31 interfaces
bus/entradas-salidas TON (Telefast SB2 IP20):
- de
4E/48: 124 señales de entrada y 124 señales de salida (248
E/S)
- de 4E: 124 señales de entrada
- de 4S: 124 señales de salida
(o
combinaciones de ellos usando 31 como máximo por cada bus AS-i).
En
una misma red se pueden instalar sensores/accionadores conectados o no
conectados con un bus AS-i.
El número y tipo de elementos
físicos que se precisa conectar implica, en determinadas máquinas,
la utilización de varios segmentos AS-i (y por tanto de varios
maestros AS-i).
Consumo de sensores/accionadores:
El
bus AS-i transmite al mismo tiempo las señales relativas a la
comunicación y la alimentación precisa para el
funcionamiento de los esclavos, los sensores e incluso los accionadores
presentes en el bus.
La alimentación del bus debe
suministrar por un lado una tensión de 30 V entre los dos hilos del
bus A8-i y al mismo tiempo, impedir que la caída de tensión
máxima admisible en cualquier punto del bus supere los 3 V.
Por
tanto, en la fase de diseño de la arquitectura con bus AS-i es
necesario realizar un balance de consumo de todos los componentes
conectados, con el fin de no sobrepasar los límites del bus.
Cuando
los accionadores requieran la utilización de una alimentación
auxiliar, se debe tener en cuenta:
· su localización
respecto de la caída de tensión en la línea (consumo
eléctrico) y la instalación (en cofre, en armario},
·
el cable de la alimentación.
Nota: El tratamiento
de las señales de seguridad y del paro de emergencia pueden
condicionar el modo de alimentación de los accionadores. Consulte
el apartado 5.4.
Distancias:
Si se amplía
la instalación que se desea controlar, es necesario utilizar, bien
un repetidor en el bus, bien una o varias pasarelas que permitan ampliar
la red:
· el repetidor permite alargar el bus AS-i ya
existente 100 metros más,
· la pasarela permite gestionar
nuevos buses AS-i para una parte de la instalación.
Para
esta solución, la instalación está dividida en varios
segmentos AS-i (16 como máximo si se utiliza la pasarela FIPIO).
Conviene
destacar que en una red FIPIO, la longitud de red puede ser de 1 kilómetro
para un flujo de 1 megabit (cableado en hilo de cobre).
En el caso de
una conexión en protocolo MODBUS y un flujo de 9.600 baudios, la
longitud de red puede ser de 1.200 metros con RS485 y de 15 metros en
RS232.
5.1.4 Tiempo de respuesta necesario
El tiempo de respuesta que precisa el sistema también
determina su arquitectura. Se define el tiempo de respuesta como el tiempo
transcurrido entre el cambio de estado de un sensor y la acción
sobre un accionador. Este tiempo de respuesta depende del tipo de maestro
utilizado en la red y del tipo de red mismo:
· un maestro
tipo módulo AS-i para autómata,
· un maestro tipo módulo
pasarela conectado a la red FIPIO o MODBUS.
Es importante tener
presente que el tiempo de transmisión depende del número de
abonados al bus.
Ejemplo:
1) Si se utiliza un módulo
para autómata, el tiempo de respuesta típico es de 25 m,
incluido 2 veces el tiempo de ciclo del bus AS-i (2 x 5 ms), el tiempo de
ejecución del programa de autómata (10 ms por ejemplo) y 2
tiempos de ciclo del módulo (5 ms).
2) Si se utiliza una
pasarela que garantice la conexión entre el bus AS-i y la red
conectada aun autómata (por ejemplo FIPIO), el tiempo de respuesta
incluye también el tiempo de procesamiento de la pasarela para
realizar la conversión y el tiempo de espera en la red entre el autómata
y la pasarela.
Este tiempo de reacción típico es
del orden de 130/140 ms para 30 equipos agentes en la red FIPIO (con un máximo
de 64 agentes en la red FIPIO).
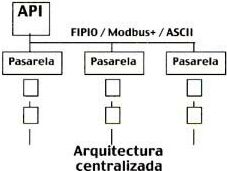
Si se utilizan varias redes AS-i
se pueden diseñar distintas arquitecturas:
Su elección
depende del tiempo de respuesta necesario y del modo en el que se desee
programar el proceso: con tratamiento centralizado, repartido o
distribuido.
Nota: En definitiva, para calcular el tiempo
de respuesta hay que tener en cuenta 3 factores:
· 2 veces
el tiempo de ciclo de bus AS-i, (uno para recoger la señal del
sensor y otro para enviar la orden al accionador después de
procesar la información).
· 2 veces el tiempo de proceso
del elemento que controla el bus AS-i y a la vez transmite la información
al autómata (puede ser el módulo para TSX Micro o las
pasarelas AS-i/FIPIO y AS-i/MODBUS).
· El tiempo de ejecución
del programa de autómata.
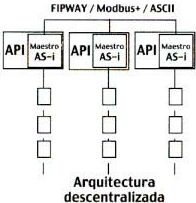
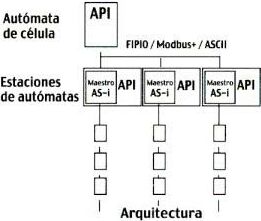
Como ejemplo, se muestran los
siguientes tipos de arquitecturas multisegmentos AS-i:
En el caso de una arquitectura descentralizada o
distribuida, el tiempo de respuesta típico es de 20 ms.
Conclusión:
en la elección de la arquitectura y de la red utilizada se debe
tener en cuenta:
· la capacidad de conexión del
conjunto de entradas/salidas,
· el tiempo de respuesta necesario,
·
la topología de la propia máquina,
· las características
de la red FIPIO o MODBUS (flujo, longitud, número de equipos) y las
características del bus AS-i.

Fuente
de información: TELEMECANIQUE