Esta propiedad es el resultado de mecanismos de detección de fallos que empiezan a actuar antes de que se reconstruya el telegrama y mejoran la fiabilidad de AS-i varios grados, sin necesidad de añadir y utilizar un código de control complejo.
a) Certificado de los productos AS-i
El certificado AS-i de los aparatos garantiza el respeto a las normas y la posibilidad de intercambiarlos con otros productos con el mismo perfil.
b) Protección de los productos
Aunque ya se han descrito las precauciones adoptadas para proteger los elementos contra los cortocircuitos y las sobretensiones, conviene recordar que en determinados casos:
· si se produce un cortocircuito o una sobretensión en un esclavo, éste se detiene (volviendo a la posición de reposo, según el tipo de producto) y no interfiere en la comunicación entre el maestro y los demás esclavos,
· un cortocircuito o una sobretensión en las conexiones externas del esclavo no altera la comunicación entre el maestro y los demás esclavos, ni tampoco aumenta el consumo de corriente,
· los esclavos toleran las caídas de tensión muy breves (inferiores al mínimo de tensión autorizado) durante 1 ms sin alteración de sus funciones,
· las inversiones de polaridad en un esclavo no resultan perjudiciales para éste,
· cuando la tensión de alimentación es inferior a 26,5 V, todas las funciones lógicas del esclavo siguen siendo funcionales. Unicamente el emisor del esclavo detiene la transmisión i cuando la tensión sea de aproximadamente 14 V; el "reset" tiene lugar cuando se superan los 14 V,
· la alimentación está protegida contra los cortocircuitos, las caídas de tensión y las sobretensiones.
c) Transmisión y codificación de la señal
Las tramas, tal y como se describe en el apartado sobre tramas, incluyen escasa información de servicio, en especial la referida al control de fallos (un solo bit de paridad). Pero gracias a otros mecanismos, como la codificación Manchester o la emisión de señales con la forma *?sin2, la transmisión resulta muy eficaz.
Tiene un rendimiento muy elevado: 167 Kbits/s sin tener en cuenta los intervalos bit durante las transacciones, el rendimiento real (incluyendo las pausas del maestro y de los esclavos) es de 53,3 Kbits/s.
La serie de bits que se va a transmitir se codifica primero en SRC (Sin Retorno a Cero) y a continuación se convierte al código Manchester (ver apartado "principios del bus: protocolo AS-i" ); esta técnica genera pocos parásitos pero requiere un circuito desacoplador en relación con la fuente de alimentación continua (ver capítulo sobre la alimentación). Todas estas operaciones son transparentes para el usuario.
La transmisión se realiza gracias a la corriente portadora con la técnica de modulación por impulsos alternativos (APM). Este procedimiento utiliza un ancho de banda de transmisión pequeño y una señal en sin2 con un armónico de baja frecuencia que reduce al mínimo los problemas de radiación del cable.
Durante la transmisión, a cada impulso negativo sigue un impulso positivo (redundancia implícita), lo que permite controlar la trama de forma permanente y completa. Además, la simetría del cable contribuye a una mayor integridad de los datos.
El receptor comprueba la amplitud de la señal y los impulsos parásitos de todos los telegramas entre el maestro y los esclavos.
Todas estas técnicas de tratamiento de la señal y los procesos de control de fallos garantizan una detección al 99,999%; concretamente, los telegramas que contienen uno, dos o incluso tres errores de impulso se detectan siempre. Los telegramas con cuatro o cinco errores se detectan con un porcentaje de éxito del 99,999%.
Los procesos de comprobación resultan pues muy eficaces.
d) Comportamiento en caso de mensaje erróneo
Estos son los errores detectables:
· error en bit de inicio,
· error de alternancia,
· error de información,
· error de pausa,
· error de paridad,
· error en bit de final,
· error en la extensión del mensaje.
Cuando aparece uno de estos errores, el mensaje es erróneo, y el maestro puede volver a transmitir su petición hasta tres veces más. Si no obtiene respuesta, la operación se considera fallida.
Esta nueva emisión influye muy poco sobre la duración del ciclo (aproximadamente 0, 15 ms más).
La siguiente tabla presenta de forma global la probabilidad de errores a partir de la cual no se garantiza la duración de ciclo de 5 ms (probabilidad de 5.10*?-4).
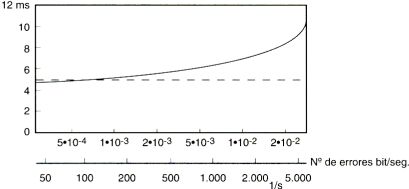
Si se producen más de 5.000 errores bit/seg, ya no se garantiza la transmisión del bus.
e) Funciones de control de error
La seguridad AS-i también está vinculada a las funciones de control de error de los componentes. Efectivamente, estas funciones permiten notificar:
· las averías de los componentes AS-i,
· las averías temporales, como la acumulación de suciedad en los sensores,
· las averías repentinas, como un cable AS-i cortado o un esclavo fuera de servicio,
· las averías de alimentación.
El controlador siempre tiene acceso a esta información (PC o API), lo que garantiza una mayor seguridad a través del diagnóstico/control.
f) Protección contra los errores de servicio
El principio de comparación entre una configuración proyectada y la configuración detectada durante la fase de inicialización y durante la fase cíclica de intercambio de datos permite a, AS-i reconocer cualquier cambio de configuración, y por lo tanto detectar fallos o instalaciones incorrectas de los sensores/accionadores del bus.
Por último, hay que recordar que el direccionamiento automático también supone una mayor seguridad para el usuario, ya que evita el riesgo de direccionamiento erróneo utilizando herramientas específicas y asegura la continuidad de servicio de la máquina.
